• 模拟产品上料、分拣、装配、质检、入库流程,适合机器视觉综合实训
• 集成2D视觉、3D视觉、机械手、PLC、图形化视觉软件、深度学习算法等模块
• 满足2D视觉、3D视觉、深度学习的全面学习需要
一、课程性质和任务
推荐学时:48
学分:3
适用对象:大学本科、专科高年级学生,涉及专业包括:高校智能制造、机器人、人工智能、电气、机械、计算机等工学相关专业。
前置课程:DCCKVisionPlus基础课程、计算机程序设计、电路基础、可编程控制器编程与应用、工业机器人操作与编程应用等。
二、课程基本要求
本课程主要内容包括:视觉瑕疵检测、3D点云图像处理、3D高度检测、引导定位抓取和装配、视觉测量分检、视觉读码识别、分类深度学习等。
三、教学条件
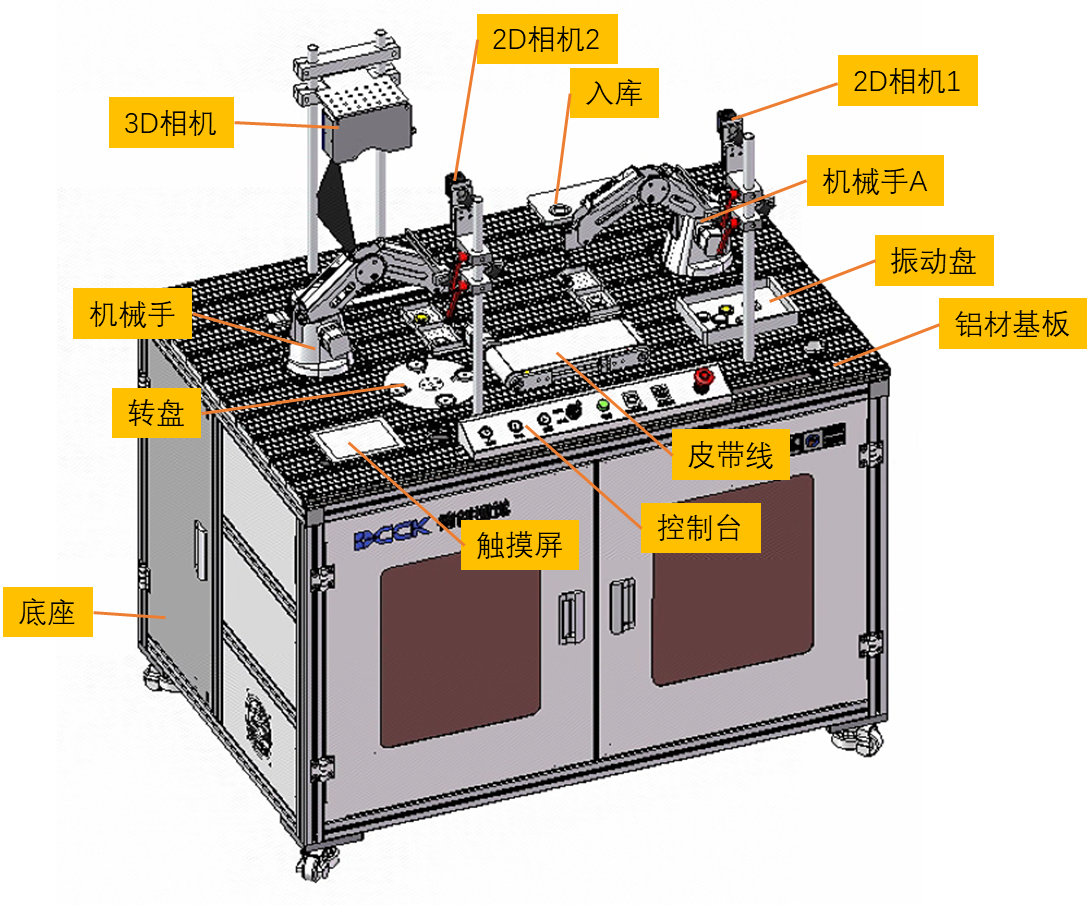
模块化智能制造多维视觉实验平台
四、教学内容
| 序号 | 教学单元 | 学习目标 | 课程内容 |
|---|---|---|---|
| 1 | 设备介绍及硬件通讯 |
应知 1. 了解德创模块化智能制造多维视觉实验平台硬件组成 2. 熟悉德创模块化智能制造多维视觉实验平台操作方法 应会 1. 正确操作德创模块化智能制造多维视觉实验平台 2. 掌握在DCCKVisionPlus设备管理内配置硬件并进行通讯的方法 |
1. 设备整体介绍 2. 添加并配置2D相机、3D相机、光源、PLC、机械手 3. 建立通讯 |
| 2 | 引导原理和标定方法 |
应知 1. 知道为何进行手眼标定 2. 了解标定方法 应会 1. 掌握通用标定流程 |
1. 引导案例展示 2. 引导原理 3. 标定方法(九点) 4. 旋转轴计算Tool中心 5. 通用标定方法 |
| 3 | 标定及标准位示教 |
应知 1. 了解标定指令含义 2. 熟悉手动标定流程 3. 了解标准位示教的意义 4. 熟悉标准位示教流程 应会 1. 独立搭建标定程序和标准位示教程序 2. 掌握手眼标定和标准位示教工具的使用方法 3. 正确使用相关指令 |
1. 标定流程指令 2. 引导模块:手眼标定 3. 引导模块:标准位示教 |
| 4 | 纽扣电池引导抓取 |
应知 1. 熟悉固定相机引导抓取通用程序 2. 了解标准位示教的意义 3. 熟悉标准位示教流程 应会 1. 独立搭建程序 2. 掌握引导模块工具:特征定位、引导计算 3. 掌握机械手模块:绝对位置移动、吸气控制 4. 和PLC通讯,正确发送和接收相关指令 |
1. 引导模块:特征定位、引导计算 2. 机械手模块:绝对位置移动、吸气控制 3. 通讯模块:PLC扫描、写PLC、读PLC 4. 其他:变量管理 5. 复习已学工具 |
| 5 | 深度学习概念与模型框架 |
应知 1. 了解深度学习技术 应会 1. 熟悉深度学习技术应用 |
1. 深度学习概念、模型和框架 2. 深度学习应用案例展示 |
| 6 | 纽扣电池正反检测 |
应知 1. 熟悉机械手固定位置取放料通用程序 2. 了解分类分拣的逻辑顺序 应会 1. 独立搭建程序 2. 掌握工具:光源设定、ToolBlock、字符串操作、逻辑运算、多元选择工具 3. 掌握深度学习分类判断并放于不同点位的方法 4. 和PLC通讯,正确写入地址 |
1. 视觉处理相关工具:光源设定、ToolBlock检测和识别 2. DCCKClassityTool深度学习分类工具 3. 数据分析相关工具:字符串操作、逻辑运算、多元选择工具 4. 复习已学工具 |
| 7 | 3D相机及视觉成像原理 |
应知 1. 了解3D视觉技术成像原理及测量原理 应会 1. 熟悉3D视觉应用 |
1. 3D视觉及相机成像原理 2. 3D数据表示方法及测量原理 3. 3D视觉应用案例 |
| 8 | 纽扣电池3D测量及码垛判断 |
应知 1. 3D测量逻辑及流程 应会 1. 独立搭建程序 2. 掌握3D相关工具 3. 掌握结果数据分析工具 4. 和PLC通讯,正确写入地址 5. 正确码垛 |
1. 3D取像 2. Z转CogImage16Range 3. 3DRangeImagePlaneEstimator 4. 结果数据分析 5. 复习已学工具 |
| 9 | 仓位循环清空 |
应知: 1. 了解仓位循环清空的作用 应会 1. 独立搭建程序 2. 正确清空所有料仓 |
1. PLC扫描 2. 写PLC 3. 机械手工具:绝对位置移动、吸气控制 4. 写日志 5. 复习已学工具 |
| 10 | 运行界面设计 |
应知 1. 了解运行界面的搭建方法 应会 1. 独立搭建运行界面 2. 掌握界面设计基础控件、运行结果及高级功能的使用 |
1. 基础控件:运行/停止、动作按钮显示窗口、动作按钮查看设备和变量、动作按钮触发信号、单行文本、形状、图片、数值写入、设备状态 2. 运行结果:OK/NG统计、结果数据、图像(Cognex)、运行日志 |
| 11 | 实操考核 | 规定课时内完成 |
五、课时分配表
| 模块化智能制造多维视觉实验平台-纽扣电池引导抓取 | |||||
|---|---|---|---|---|---|
| 序号 | 教学单元 | 讲授 | 实训 | 小计 | 合计 |
| 1 | 设备介绍及硬件通讯 | 1 | 2 | 3 | 16 |
| 2 | 引导原理和标定方法 | 1 | 1 | ||
| 3 | 纽扣电池引导抓取-标定及标准位示教 | 1 | 2 | 3 | |
| 4 | 纽扣电池引导抓取-取放料自动运行 | 1 | 2 | 3 | |
| 5 | 运行界面设计 | 1 | 1 | 2 | |
| 6 | 实操考核 | 4 | |||
| 模块化智能制造多维视觉实验平台-纽扣电池正反检测 | |||||
| 序号 | 教学单元 | 讲授 | 实训 | 小计 | 合计 |
| 1 | 设备介绍及硬件通讯 | 1 | 2 | 3 | 18 |
| 2 | 深度学习概念与模型框架 | 1 | 1 | ||
| 3 | 纽扣电池正反检测-传送带取放料 | 1 | 2 | 3 | |
| 4 | 纽扣电池正反检测-分度盘检测 | 1 | 2 | 3 | |
| 5 | 纽扣电池正反检测-分度盘取放料 | 1 | 1 | 2 | |
| 6 | 运行界面设计 | 1 | 1 | 2 | |
| 7 | 实操考核 | 4 | |||
| 模块化智能制造多维视觉实验平台-纽扣电池3D高度测量 | |||||
| 序号 | 教学单元 | 讲授 | 实训 | 小计 | 合计 |
| 1 | 设备介绍及硬件通讯 | 1 | 2 | 3 | 16 |
| 2 | 3D相机及视觉成像原理 | 1 | 1 | ||
| 3 | 纽扣电池3D高度测量-3D测量 | 1 | 2 | 3 | |
| 4 | 纽扣电池3D高度测量-码垛判断 | 1 | 2 | 3 | |
| 5 | 运行界面设计 | 1 | 1 | 2 | |
| 6 | 实操考核 | 4 | |||
| 模块化智能制造多维视觉实验平台-整体流程 | |||||
| 序号 | 教学单元 | 讲授 | 实训 | 小计 | 合计 |
| 1 | 设备介绍及硬件通讯 | 2 | 2 | 4 | 40 |
| 2 | 引导原理和标定方法 | 1 | 1 | ||
| 3 | 标定及标准位示教 | 1 | 3 | 4 | |
| 4 | 纽扣电池引导抓取 | 1 | 2 | 3 | |
| 5 | 深度学习概念与模型框架 | 1 | 1 | ||
| 6 | 纽扣电池正反检测 | 2 | 4 | 6 | |
| 7 | 3D相机及视觉成像原理 | 1 | 1 | ||
| 8 | 纽扣电池3D测量及码垛判断 | 2 | 4 | 6 | |
| 9 | 仓位循环清空 | 1 | 1 | 2 | |
| 10 | 运行界面设计 | 2 | 2 | 4 | |
| 11 | 实操考核 | 8 | 8 | ||
六、考核方式
1、平时实操考核70%+期末考核30%,其成绩占总成绩90%;
2、出勤、作业、课堂问答占总成绩10%。
七、教学说明
本课程实施应以讲授与实操相结合,在授课过程中,充分利用模块化智能制造多维视觉实验平台设备、多媒体动画、视频等教具,加以学生小组讨论、现场实操、提问等教学手段,充分激发学生学习兴趣和主观能动性。
八、教材和操作手册
德创机器视觉自编教材。