• 模拟工业现场视觉引导装配场景,适合机器视觉进阶实践教学
• 由三个2D视觉采集前端、工业四轴模组、桌面流水线、图形化视觉软件组成
• 满足2D视觉引导、检测、测量、识别四大应用,以及电气PLC实训需要
一、课程性质和任务
学分:2
学时:32
适用对象:大学本科、专科高年级学生,涉及专业包括:自动化、机器人、计算机科学与技术、光电信息科学与工程、机电一体化等。
前置课程:DCCKVisionPlus基础课程、计算机程序设计、电路基础、可编程控制器编程与应用、工业机器人操作与编程应用等。
二、课程基本要求
本课程主要内容包括:二值图像分析、缺陷检测、几何中心计算、手眼标定、标准位示教、特征定位、引导计算等。
三、教学条件
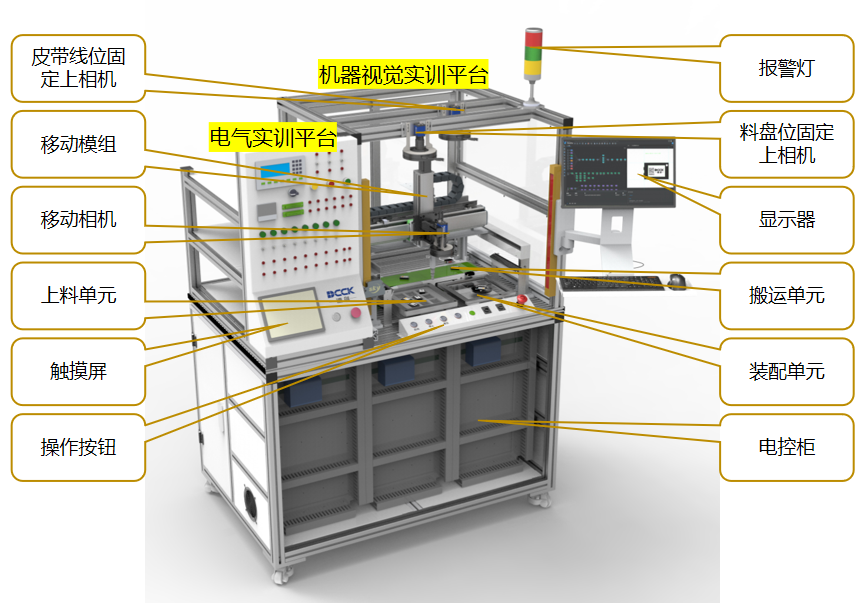
德创机器视觉及电气综合实训平台
四、教学内容
| 序号 | 教学单元 | 学习目标 | 课程内容 |
|---|---|---|---|
| 1 | 引导类型介绍和案例分享 |
应知 1. 了解引导类型 2. 熟悉引导设备基本组成 应会 1. 正确概述引导类型 |
1. 引导类型分类 2. 视觉与机构配合方式 3. 相机安装方式(固定和手部) 4. 拍照次数(单次多次) 5. 拍照方式(静态动态) 6. 案例分享(抓取、贴合类) |
| 2 | 设备介绍及硬件通讯 |
应知 1. 了解应用实训平台硬件组成 2. 熟悉应用实训平台操作方法 应会 1. 正确操作应用实训平台 2. 掌握在V+设备管理内配置硬件并进行通讯的方法 |
1. 设备整体介绍 2. 添加并配置相机、光源、PLC、用户日志 3. 建立通讯 |
| 3 | 引导原理和标定方法 |
应知 1. 知道为何进行手眼标定 2. 了解标定方法 应会 1. 掌握通用标定流程 |
1. 引导原理 2. 标定方法(九点) 3. 旋转轴计算Tool中心 4. 通用标定方法 |
| 4 | 手眼标定程序设计 |
应知 1. 了解程序传输流程 2. 熟悉标定通用程序 应会 1. 独立搭建标定程序 2. 掌握手眼标定使用方法 3. 和PLC通讯,正确发送和接收相关指令 |
1. 标定流程指令 2. 引导模块:手眼标定 3. PLC扫描、读PLC寄存器、字符串操作 4. 流程选择、写日志 5. 分支/分支选择、光源设定 6. 写PLC寄存器 |
| 5 | 训练吸嘴程序设计 |
应知 1. 了解训练吸嘴的意义 2. 熟悉训练吸嘴通用程序 应会 1. 独立搭建训练吸嘴程序 2. 掌握标准位训练工具的使用方法 3. 和PLC通讯,正确发送和接收相关指令 |
1. 引导模块:标准位训练 2. 复习标定流程中已学工具 3. 数值转换 4. 变量管理、写变量 |
| 6 | 场景1:固定抓取 自动运行部分程序设计 |
应知 1. 熟悉固定抓取通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 格式转换 |
| 7 | 场景2:移动抓取 |
应知 1. 熟悉移动抓取通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 4. 掌握偏移量计算方法 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 偏移量计算 5. 格式转换 6. 逻辑运算 |
| 8 | 场景3:固定抓取皮带抓取 |
应知 1. 熟悉移动抓取通用程序 2. 熟悉固定抓取通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 格式转换 |
| 9 | 场景4:固定抓取移动装配 |
应知 1. 熟悉固定抓取通用程序 2. 熟悉移动装配通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 4. 掌握偏移量计算方法 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 偏移量计算 5. 格式转换 6. 逻辑运算 |
| 10 | 场景5:移动抓取固定装配 |
应知 1. 熟悉移动抓取通用程序 2. 熟悉固定装配通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 4. 掌握偏移量计算方法 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 偏移量计算 5. 格式转换 6. 逻辑运算 |
| 11 | 场景6:固定抓取皮带抓取移动装配 |
应知 1. 熟悉固定抓取通用程序 2. 熟悉移动装配通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 4. 掌握偏移量计算方法 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 偏移量计算 5. 格式转换 6. 逻辑运算 |
| 12 | 场景7:移动抓取皮带抓取固定装配 |
应知 1. 熟悉移动抓取通用程序 2. 熟悉固定装配通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 4. 掌握偏移量计算方法 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 偏移量计算 5. 格式转换 6. 逻辑运算 |
| 13 | 场景8:移动抓取移动装配 |
应知 1. 熟悉移动抓取通用程序 2. 熟悉移动装配通用程序 应会 1. 独立搭建自动运行程序 2. 掌握引导模块工具:特征定位、引导计算 3. 和PLC通讯,正确发送和接收相关指令 4. 掌握偏移量计算方法 |
1. 引导模块:特征定位 2. 引导模块:引导计算 3. 复习已学工具 4. 偏移量计算 5. 格式转换 6. 逻辑运算 |
| 14 | 运行界面设计 |
应知 1. 了解运行界面的搭建方法 应会 1. 独立搭建运行界面 2. 掌握界面设计基础控件、运行结果及高级功能的使用 |
1. 基础控件:运行/停止、动作按钮、数值写入、单行文本、形状、图片、设备状态、指示灯、 2. 运行结果:OK/NG统计、结果数据、图像(Cognex)、运行日志 3. 高级功能:Tab控件 |
| 15 | 实操考核 | 4小时内完成 |
五、课时分配表
| 序号 | 教学单元 | 讲授 | 实训 | 小计 | 合计 |
|---|---|---|---|---|---|
| 1 | 设备介绍及硬件通讯 | 1 | 2 | 3 |
26 |
| 2 | 引导原理和标定方法 | 1 | 1 | ||
| 3 | 手眼标定程序设计 | 2 | 2 | 4 | |
| 4 | 训练吸嘴程序设计 | 2 | 2 | 4 | |
| 5 | 场景1:固定抓 自动运行部分程序设计 | 2 | 3 | 5 | |
| 6 | 运行界面设计 | 1 | 2 | 3 | |
| 7 | 实操考核 | 6 | 6 | ||
| 替换场景自动运行程序设计部分,课时数如下: | |||||
| 8 | 场景2:移动抓 | 2 | 3 | 5 | 26 |
| 9 | 场景3:固定抓固定装 | 3 | 4 | 7 | 28 |
| 10 | 场景4:固定抓移动装 | 3 | 4 | 7 | 28 |
| 11 | 场景5:移动抓固定装 | 3 | 4 | 7 | 28 |
| 12 | 场景6:固定抓皮带抓移动装 | 4 | 5 | 9 | 30 |
| 13 | 场景7:移动抓皮带抓固定装 | 4 | 5 | 9 | 30 |
| 14 | 场景8:移动抓移动装 | 3 | 4 | 7 | 28 |
六、考核方式
1、平时实操考核70%+期末考核30%,其成绩占总成绩90%;
2、出勤、作业、课堂问答占总成绩10%。
七、教学说明
本课程实施应以讲授与实操相结合,在授课过程中,充分利用机器视觉及电气综合实训平台设备、多媒体动画、视频等教具,加以学生小组讨论、现场实操、提问等教学手段,充分激发学生学习兴趣和主观能动性。
八、教材和操作手册
德创机器视觉自编教材。